步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元
步進(jìn)電機(jī)件。在構(gòu)造上有三種主要類型:反應(yīng)式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
步進(jìn)電機(jī)驅(qū)動(dòng)器是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。當(dāng)
步進(jìn)電機(jī)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)
步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度(稱為“步距角”),它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速和定位的目的。如何選擇
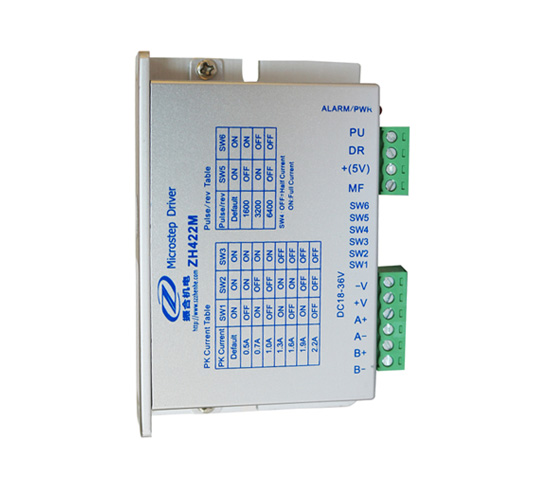
步進(jìn)電機(jī)和驅(qū)動(dòng)器?
判斷需多大力矩:靜扭矩是選擇步步進(jìn)電機(jī)進(jìn)電機(jī)的主要參數(shù)之一。負(fù)載大時(shí),需采用大力矩電機(jī)。力矩指標(biāo)大時(shí),電機(jī)外形也大。判斷電機(jī)運(yùn)轉(zhuǎn)速度:轉(zhuǎn)速要求高時(shí),應(yīng)選相電流較大、電感較小的電機(jī),以增加功率輸入。且在選擇驅(qū)動(dòng)器時(shí)采用較高供電電壓。選擇電機(jī)的安裝規(guī)格:如57、86、110等,主要與力矩要求有關(guān)。確定定位精度和振動(dòng)方面的要求情況:判斷是否需細(xì)分,需多少細(xì)分。根據(jù)電機(jī)的電流、細(xì)分和供電電壓選擇驅(qū)動(dòng)器。