步進(jìn)電機(jī)分三種:永磁式(PM) ,反應(yīng)式(VR)和混合式(HB)。 反應(yīng)式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度 或1.5度;永磁式步進(jìn)一般為三相,可實(shí)現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動都很大。
在歐美等發(fā)達(dá)國家80年代已被淘汰;混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點(diǎn)。它又分為兩相、三相和五相:兩相步進(jìn)角一般為1.8度而五相步進(jìn)角一般為 0.72度,混合式步進(jìn)電機(jī)隨著相數(shù)(通電繞組數(shù))的增加,步進(jìn)角減小,精度提高,這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。
我國的情況有所不同,直到20世紀(jì)80年代,一直是磁阻式步進(jìn)電機(jī)占統(tǒng)治地位,混合式步進(jìn)電機(jī)是80年代后期才開始發(fā)展,至今仍然是二種結(jié)構(gòu)類型同時并存。盡管新的混合式步進(jìn)電機(jī)完全可能替代磁阻式電機(jī),但磁阻式電機(jī)的整機(jī)獲得了長期應(yīng)用,對于它的技術(shù)也較為熟悉,特別是典型的混合式步進(jìn)電機(jī)的步距角(0.9°/1.8°)與典型的磁阻式電機(jī)的步距角(0.75°/1.5°)不一樣,用戶改變這種產(chǎn)品結(jié)構(gòu)不是很容易的,這就使得兩種機(jī)型并存的局面難以在較短時間內(nèi)改變。這種現(xiàn)狀對步進(jìn)電機(jī)的發(fā)展是不利的。
混合式步進(jìn)電機(jī)可以朝以下四個方向發(fā)展:
發(fā)展趨勢之一,是繼續(xù)沿著小型化的方向發(fā)展。隨著電機(jī)本身應(yīng)用領(lǐng)域的拓寬以及各類整機(jī)的不斷小型化,要求與之配套的電機(jī)也必須越來越小,在57、42 機(jī)座號的電機(jī)應(yīng)用了多年后,現(xiàn)在其機(jī)座號向39、35、30、25方向向下延伸。瑞士ESCAP公司最近還研制出外徑僅10mm的步進(jìn)電機(jī)。
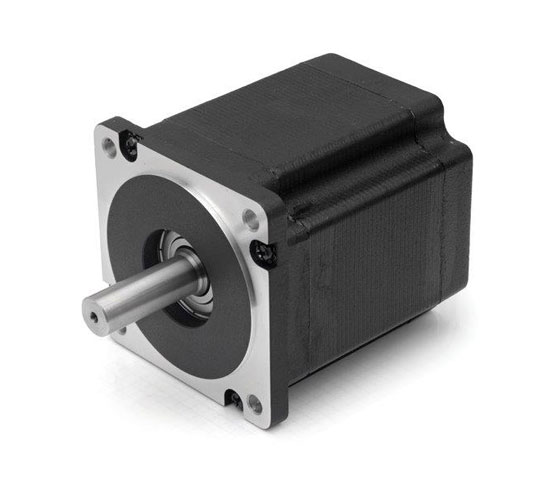
發(fā)展趨勢之二,是改圓形電機(jī)為方形電機(jī)。由于電機(jī)采用方型結(jié)構(gòu),使得轉(zhuǎn)子有可能設(shè)計得比圓形大,因而其力矩體積比將大為提高。同樣機(jī)座號的電機(jī),方形的力矩比圓形的將提高30%~40%。
發(fā)展趨勢之三,對電機(jī)進(jìn)行綜合設(shè)計。即把轉(zhuǎn)子位置傳感器,減速齒輪等和電機(jī)本體綜合設(shè)計在一起,這樣使其能方便地組成一個閉環(huán)系統(tǒng),因而具有更加優(yōu)越的控制性能。
發(fā)展趨勢之四,向五相和三相電機(jī)方向發(fā)展。目前廣泛應(yīng)用的二相和四相電機(jī),其振動和噪聲較大,而五相和三相電機(jī)具有優(yōu)勢性。而就這兩種電機(jī)而言,五相電機(jī)的驅(qū)動電路比三相電機(jī)復(fù)雜,因此三相電機(jī)系統(tǒng)的性能價格比要比五相電機(jī)更好一些。
更多行業(yè)咨詢QQ:176340526 覃工